













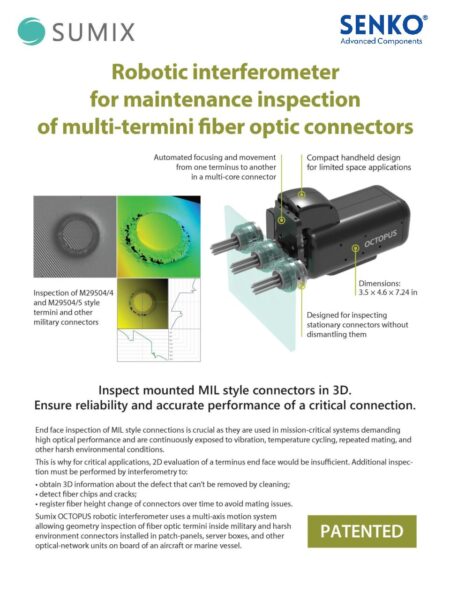
OCTOPUS Robotic Interferometry
The OCTOPUS robotic interferometer uses a multi-axis motion system to move the camera to the ferrule end faces of hardened connectors. This system performs end face geometry measurements and anomaly detection for each of the fiber optic termini inside military and harsh environment connectors installed in patch-panels, server boxes, and other optical-network units on board of an aircraft or marine vessel. The OCTOPUS measures fiber heights and radius of curvature for the each of the termini while the assembly remains in service.
- Multi termini end face geometry
- Robotic X, Y axis positioning
- Anomaly detection
| Parameters | Specifications |
| SENKO Part Number | OCTOPUS |
| Connectors inspected | MIL-DTL-38999 and other MIL spec and harsh environment multi ferrule connectors |
| Field of view | D = 1.6 mm Area covered Y, X-axis motion: ± 12.5 mm |
| Optical resolution | 3.2 μm |
| Magnification | 300× |
| Focus | Autofocus |
| Focus range | 4 mm |
| Measurement mode | White Light + Phase Shift |
Aerospace Optical Networks

Military Communications Networks

Naval Communications

Energy Exploration and Production



The OCTOPUS uses a multi-axis motion system to scan the 3D surface and measure geometry parameters for each terminus of a fiber optic connector automatically.
The current range of available adapters includes the adapters for inspection of:
- MIL-DTL-38999 connector, Series III, shell size 15, receptacle, socket insert and pin insert;
- MIL-DTL-38999 connector, Series III, shell size 25, receptacle, socket insert and pin insert;
- MIL-DTL-38999 connector, Series III, shell size 25, plug, socket insert and pin insert.
Other adapters can be added upon customer’s request.
The scanning and measurement time is 10 seconds per end face. A connector with six termini would take about 1 minute.


